
Taking technologies to the next level
To take automotive perception systems beyond the state-of-the art AI-SEE will combine complex hardware and software development.
The concept is built on the four main blocks as shown in the figure below.
- A high resolution adaptive all-weather sensor suite with novel sensors
- An AI platform for predictive detection of prevailing environmental conditions including signal enhancement and sensor adaption
- A novel simulation path which allows to realistically simulate adverse weather near the sensor to adapt and test the system on both real and artificially generated road scenes
- High definition maps with dynamic layers adaptable to changing weather conditions
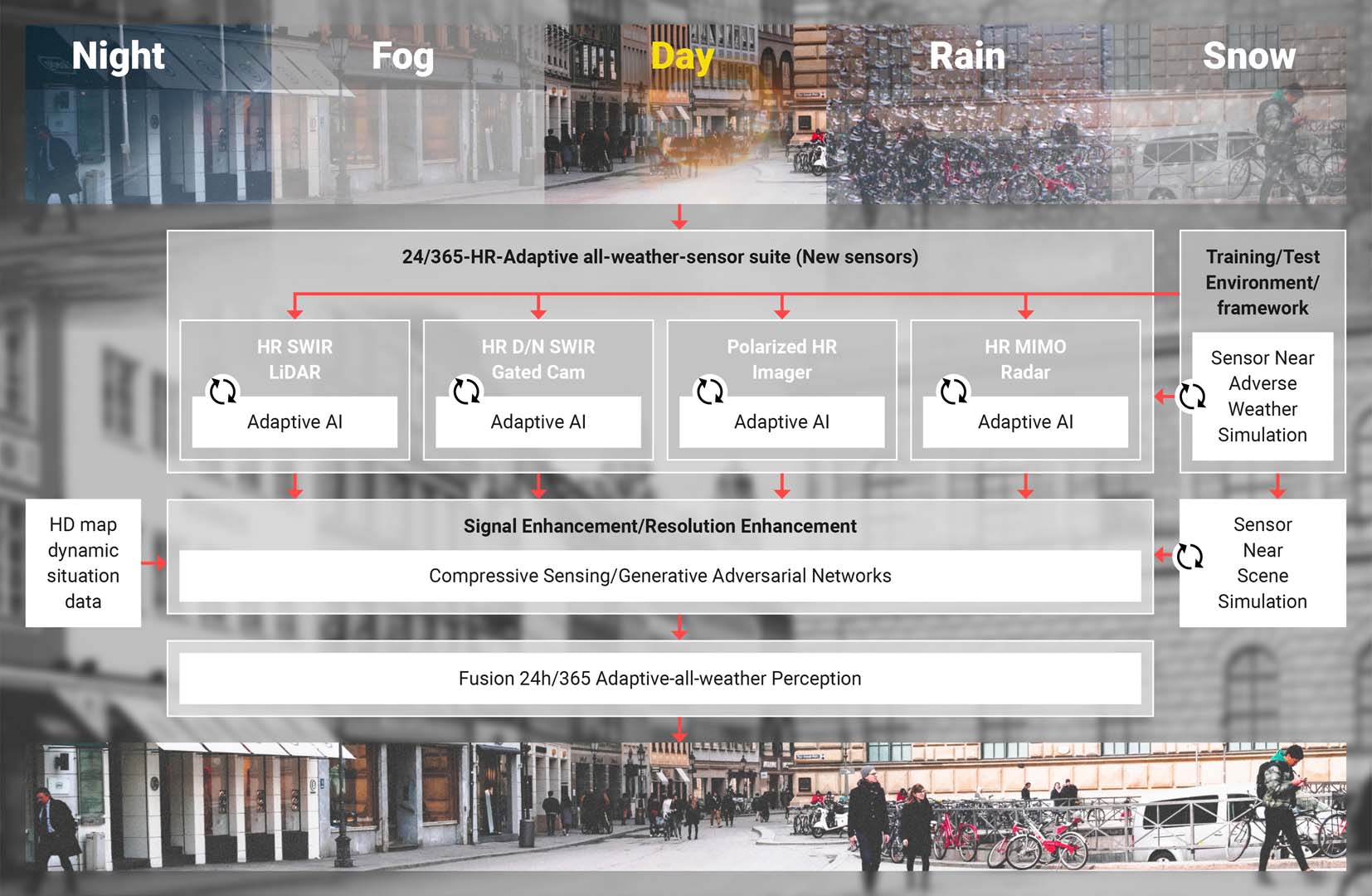
All weather multi-sensor perception system supported by AI
Sensor-near simulation models for all active sensors for artificial generation of synthetic inclement weather datasets will be developed. This is expected to revolutionise simulation, with conversion of good weather neural network datasets into inclement weather datasets, thereby saving large amounts of money and time in testing and validating inclement weather sensor performance.



